
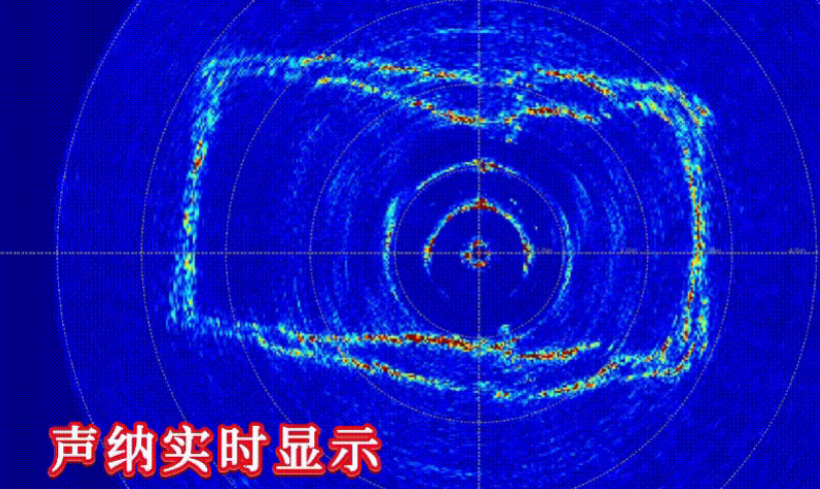
近年来,随着大型水利工程和地下设施复杂化,传统人工检测面临效率低、风险高等挑战。针对隧洞结构安全监测中流急环境感知弱、狭窄空间机动性差等核心难题,上海理工大学水下机器人与智能系统研究院朱大奇教授团队成功研制出融合全驱动-欠驱动双模自适应系统的隧洞探测机器人,实现厘米级环境建模、毫米级缺陷识别与秒级应急响应的智能化运维体系,为地下工程安全运维提供智能化解决方案。该隧洞探测水下机器人融合全驱动和欠驱动两种工作模式;装备声纳实时显示探测结果,融合光谱摄像头,实现缺陷毫米级识别;支持0.1秒级动态路径规划,确保复杂环境连续作业。
该AUV已成功应用于南水北调中线郑州段、引汉济渭黄金峡水库、山东临沭黄庄倒虹吸工程以及苏州杨柯柜输水隧洞检测等多个国家重点水利工程,在保障工程安全运行、提升检测效率方面成效显著,取得了显著的经济社会效益。


 地址:上海市军工路516号
地址:上海市军工路516号  邮编:200093
邮编:200093 电话:021-55270595
电话:021-55270595