

Seamor 300 ROV(加拿大进口,有缆水下机器人,最大潜深500米,配置300米脐带缆,彩色水下摄像系统、成像声纳、单功能机械手等。主要用途为水下观察、测绘及目标搜寻。)

OUTLAND1000 ROV(美国进口,有缆水下机器人,最大潜深500米,配150米脐带缆,配备有水下摄像系统、成像声纳、单功能机械手等。主要用途为水下观察、测绘及目标搜寻。)

Falcon SeaEye ROV(英国进口,作业型有缆水下机器人,最大潜深>500米,配300米脐带缆,配置五功能机械手、成像声纳、水下双摄像系统等,可用于水下观察、目标搜寻及相关作业。)
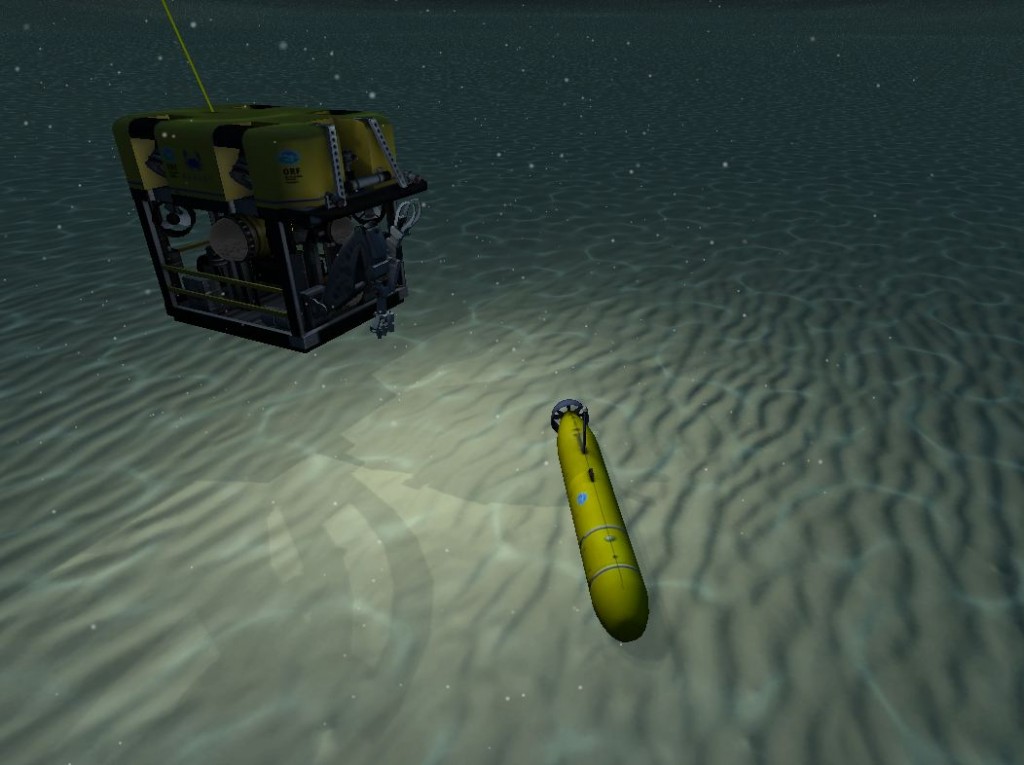
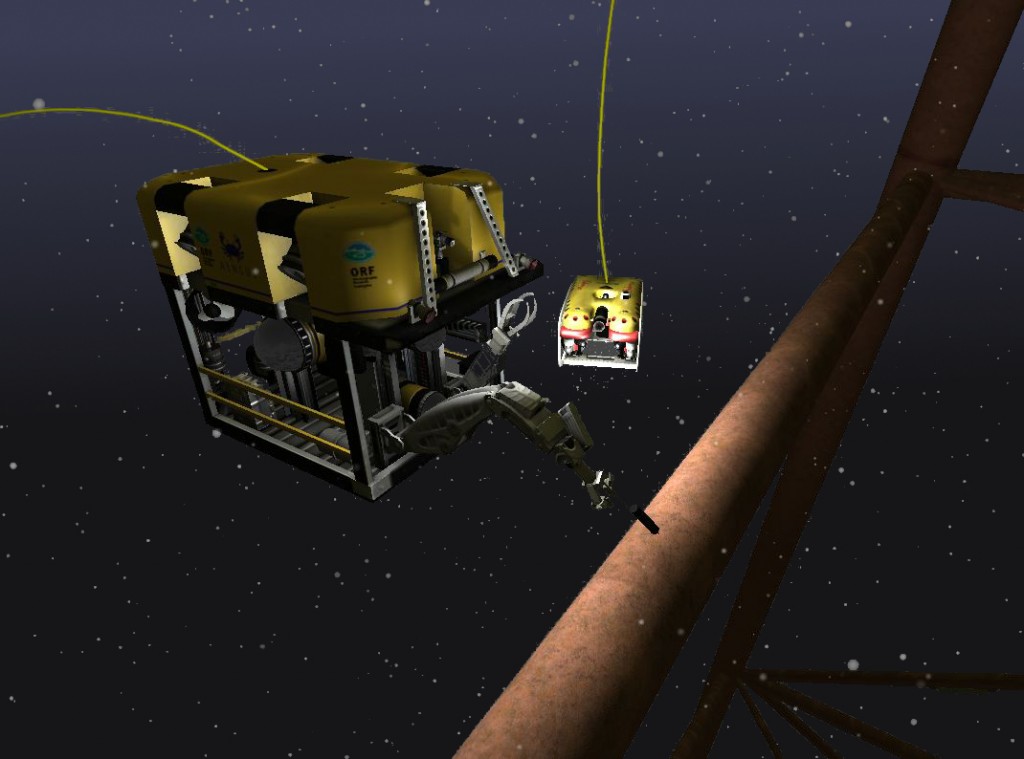
ROV模拟操作系统-美国
主要功能指标:
1、一体化的模拟操作硬件平台,包括计算机、投影仪、液晶显示屏、模拟操纵杆等;
2、具有扫描声呐功能,能提供实时的声呐视屏;
3、教练员遥控操作,教练3D 场景,能从第三者的各个视角,观察学员的操作;
4、脐带吊笼;
5、ROV 姿态控制;
6、四个摄像头。能提供ROV的所有状态信息,包括导航信息,ROV和母船及固定结构物位置的信息;
7、海底结构组件自由设计;
8、海流和能见度设定、海况调节;
9、母船自动跟踪;
10、能模拟7个以上常见水下作业场景。如:海底管道检测、油田海底异物清理、潜艇救助、油田水下设备检测、港口检查、船体检验等;
11、客户自定义任务设计模块。ROV的外形尺寸及动力学系统能通过ROV
设计师模块进行调整等;使用任务编辑器用户可以创建一个新的自定义任务
环境或推出一个以前创建的任务环境,通过导入用户的模型和纹理或构建一个
提供的地形、模型和纹理,设计用户自己的任务。
12、客户自定义其他模块。包括定义水下目标、障碍物、海流;自定义ROV,包括ROV的外形结构,推进器的数量、布局和推力大小,机械臂和传感器等。
 地址:上海市军工路516号
地址:上海市军工路516号
 邮编:200093
邮编:200093
 电话:021-55270595
电话:021-55270595
版权所有:上海理工大学水下机器人与智能系统研究院