自研产品
1、船舶清洗机器人
本产品主要面向于船体及水下结构物上的附着物清洗需求,当船舶在远洋航行后,船体表面会附着藤壶等附着物。
本产品可以替代现有船坞清洗及人工水下清洗,可在舰船于锚地停泊时完成船体附着物的清洗作业,具有清洗效率高,清洗成本低等优点。
本产品也可用于海上平台、跨海大桥等需要进行水下结构体表面附着物清洗的应用需求。
基本功能:
[1]智能船体清洗机器人载体指标:最大工作深度100m,负载能力≥20kg,水中抗流能力3节,履带爬行速度≥0.5m/s,能够实现6自由度运动。
[2]船体清洗工具指标:清刷能力≥200m2/h;总功率不小于15KW;最大输出压力20MPa;最大输出流量50L/Min,最大工作深度100m

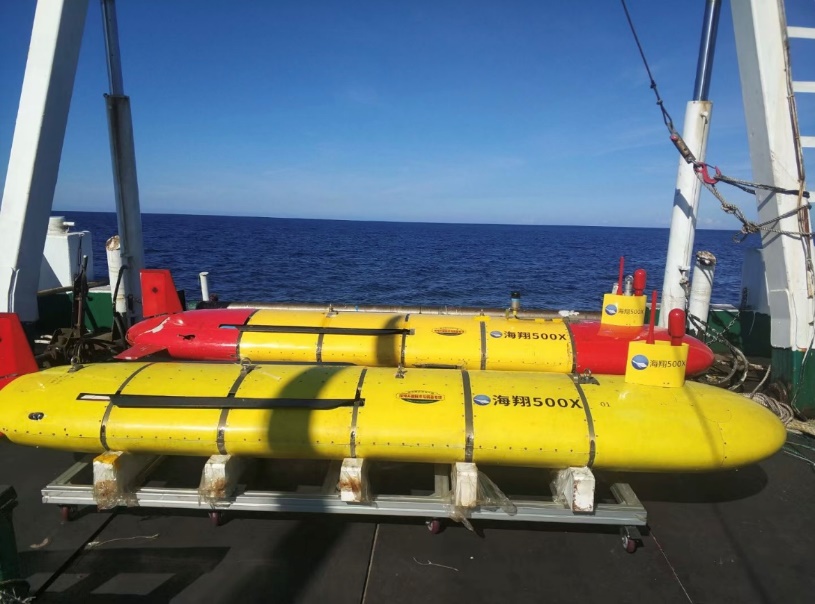
2、水下信号侦听与目标搜索双功能“海翔号”AUGV-合作研发
将水下滑翔机无动力长航程大范围侦听功能与自主水下机器人的自主精细搜索功能进行创新性集成,研发一款变结构侦-搜一体化双功能深海目标搜索水下机器人,突破水下机器人水下搜索航行地图构建、搜索路径规划与安全避障、水下机器人故障检测与抛载自救等关键技术。

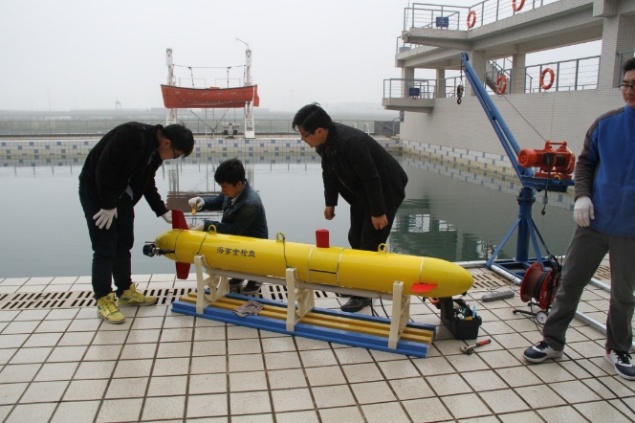
3、智海金枪鱼系列AUV
智海金枪鱼系列AUV是由上海理工大学水下机器人与智能系统研究院研制的一款自主式智能水下机器人,具有续航时间长、重量轻等优点,能在自治航行中进行人工干预,完成精细操控任务,可实现大范围的搜索,同时上传实时高清视频,并具有自主避障功能。
基本功能:♥水面航行,♥水下自主导航航行,♥水下定深/定向航行;主要参数:♦长度:2.4 m,♦直径:0.24 m,♦重量:约50 kg,♦最大航速:不小于4 knots,♦工作深度:不低于200 m,♦工作时间:3 knots航速:不少于4h,♦负载舱载重:10 kg(选配),♦舱外最大载重:约3kg,♦ 惯性导航与GPS导航,♦超短基线(选配),♦多普勒测速仪(选配),♦水下摄像机,♦CTD(选配),♦拖曳式声呐(选配),♦安全自救系统,♦避障系统(选配)
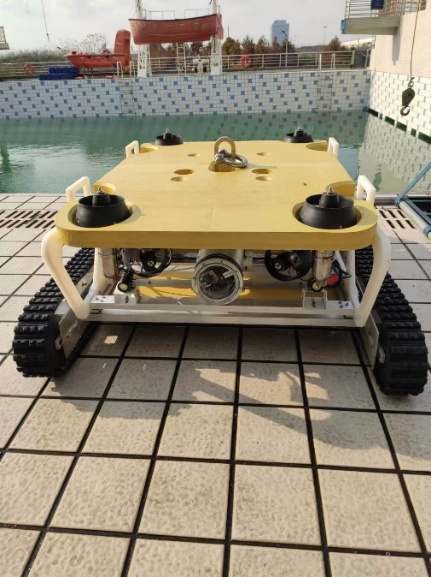
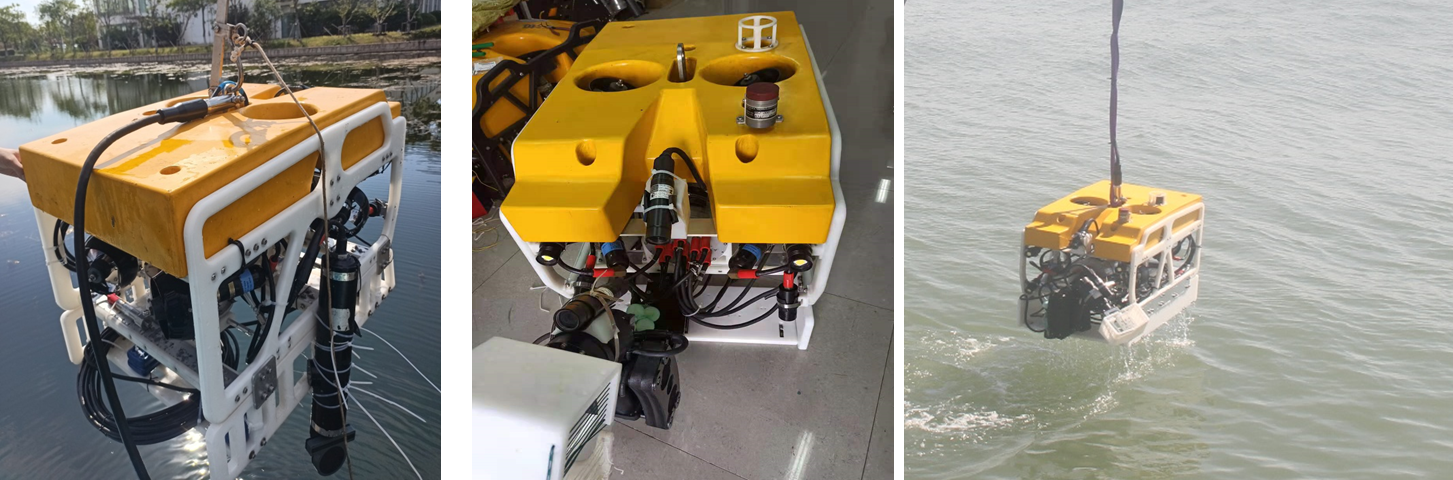
4、海寻系列ROV
“海寻”系列ROV是由上海理工大学水下机器人与智能系统研究院研制的一款遥控式搜救水下机器人,配有左右摄像机,可对水下目标进行三维重建,并利用机械手进行水下作业,提高作业的精度和效率。
基本功能:♥水面航行,♥水下定深/定向航行;主要参数:外形尺寸:1.4mX0.63mX0.46m,重量:60-400 kg,最大航速:4 knots,最大工作深度:200-1000m,最大抓取重量:5-10kg(选配)。最大载重:10-20kg。
5、“MCT90”型水下推进器
“MCT90”水下推进器采用直流空心杯有刷电机驱动,具有体积小、控制简单、推力功率比大等优点。MCT90采用磁耦合联轴器实现电机输出轴至螺旋桨的动力传递,不存在动密封装置,具有很高的可靠性。MCT90具有对称的正反向推力输出,适合于作为侧向、垂向推进器。主要参数:♥前向推力:2.2 kg,♥反向推力:2.2 kg,♥额定电压:48V,♥额定功率:90W,♥空气中重量:1.1kg,♥水中重量:0.8kg,♥工作深度:200 m,♥螺旋桨材料:尼龙,♥电气接口:2芯水密连接器(Seaconn MCBH2M或FAWL-2S-BC-R/A)。
“MCT90”型水下推进器
6、水下电动机械臂
上海理工大学水下机器人与智能系统研究院研制了五功能、七功能水下电动机械臂,采用模块化结构设计,突破了深海环境下一体化集成式关节模组、油浸耐压控制器等关键技术,具备主从手遥操作与视觉伺服自主作业能力,可适配抓取、切割等多种作业工具,有效提升水下运载器处置作业能力。
基本功能:主从手或视觉伺服自主控制;机械臂末端标配夹持器;机械臂末端可选配切割刀、切割砂轮等作业工具
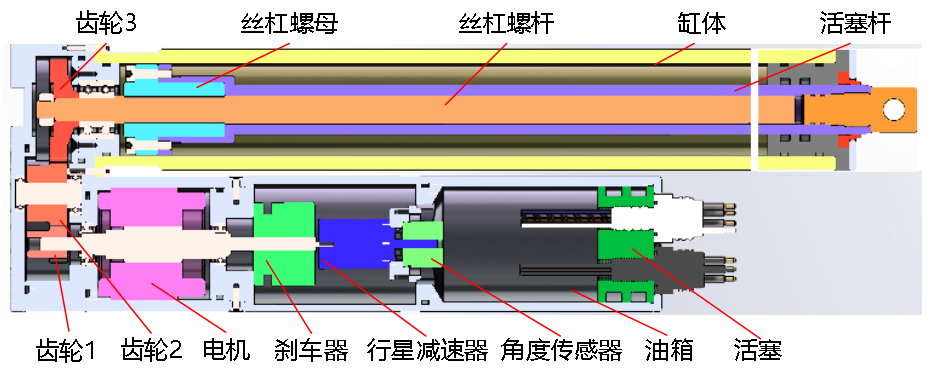
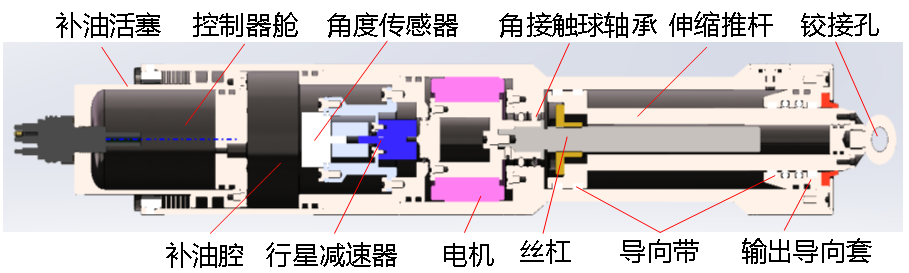
7、深海电动推杆(EMA)
上海理工大学水下机器人与智能系统研究院研制一体集成式深海电动推杆,国产化率100%,已在中船集团大量应用。
基本功能:工作深度:300m,额定电压:24 VDC;额定推力:30kgf,定位精度:3‰行程。
 地址:上海市军工路516号
地址:上海市军工路516号
 邮编:200093
邮编:200093
 电话:021-55270595
电话:021-55270595
版权所有:上海理工大学水下机器人与智能系统研究院